基于Android 6.0的源码剖析, 本文详细地讲解了ServiceManager启动流程
framework/native/cmds/servicemanager/
- service_manager.c
- binder.c
kernel/drivers/ (不同Linux分支路径略有不同)
- staging/android/binder.c
- android/binder.c
一. 概述
ServiceManager是Binder IPC通信过程中的守护进程,本身也是一个Binder服务,但并没有采用libbinder中的多线程模型来与Binder驱动通信,而是自行编写了binder.c直接和Binder驱动来通信,并且只有一个循环binder_loop来进行读取和处理事务,这样的好处是简单而高效。
ServiceManager本身工作相对简单,其功能:查询和注册服务。 对于Binder IPC通信过程中,其实更多的情形是BpBinder和BBinder之间的通信,比如ActivityManagerProxy和ActivityManagerService之间的通信等。
1.1 流程图
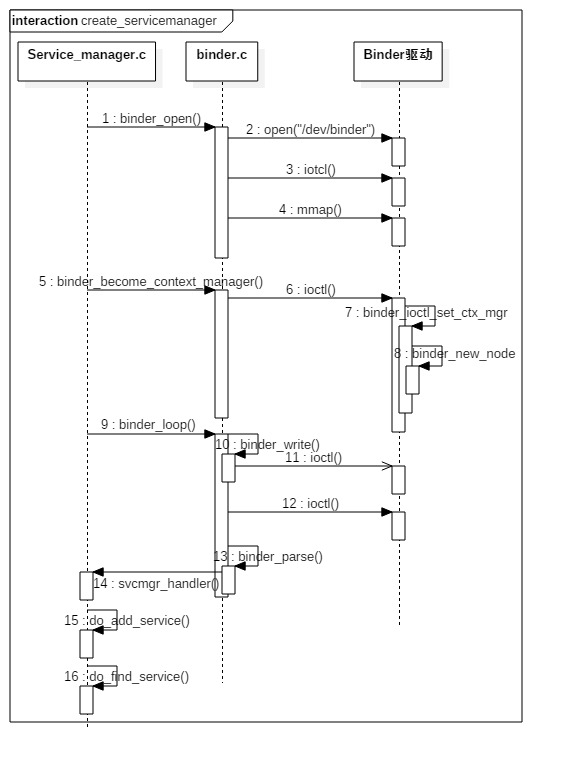
启动过程主要以下几个阶段:
- 打开binder驱动:binder_open;
- 注册成为binder服务的大管家:binder_become_context_manager;
- 进入无限循环,处理client端发来的请求:binder_loop;
二. 启动过程
ServiceManager是由init进程通过解析init.rc文件而创建的,其所对应的可执行程序/system/bin/servicemanager,所对应的源文件是service_manager.c,进程名为/system/bin/servicemanager。
service servicemanager /system/bin/servicemanager
class core
user system
group system
critical
onrestart restart healthd
onrestart restart zygote
onrestart restart media
onrestart restart surfaceflinger
onrestart restart drm
启动Service Manager的入口函数是service_manager.c中的main()方法,代码如下:
2.1 main
[ -> service_manager.c]
int main(int argc, char **argv)
{
struct binder_state *bs;
//打开binder驱动,申请128k字节大小的内存空间 【见小节2.2】
bs = binder_open(128*1024);
...
//成为上下文管理者 【见小节2.3】
if (binder_become_context_manager(bs)) {
return -1;
}
selinux_enabled = is_selinux_enabled(); //selinux权限是否使能
sehandle = selinux_android_service_context_handle();
selinux_status_open(true);
if (selinux_enabled > 0) {
if (sehandle == NULL) {
abort(); //无法获取sehandle
}
if (getcon(&service_manager_context) != 0) {
abort(); //无法获取service_manager上下文
}
}
...
//进入无限循环,处理client端发来的请求 【见小节2.4】
binder_loop(bs, svcmgr_handler);
return 0;
}
2.2 binder_open
[-> servicemanager/binder.c]
struct binder_state *binder_open(size_t mapsize)
{
struct binder_state *bs;【见小节2.2.1】
struct binder_version vers;
bs = malloc(sizeof(*bs));
if (!bs) {
errno = ENOMEM;
return NULL;
}
//通过系统调用陷入内核,打开Binder设备驱动
bs->fd = open("/dev/binder", O_RDWR);
if (bs->fd < 0) {
goto fail_open; // 无法打开binder设备
}
//通过系统调用,ioctl获取binder版本信息
if ((ioctl(bs->fd, BINDER_VERSION, &vers) == -1) ||
(vers.protocol_version != BINDER_CURRENT_PROTOCOL_VERSION)) {
goto fail_open; //内核空间与用户空间的binder不是同一版本
}
bs->mapsize = mapsize;
//通过系统调用,mmap内存映射,mmap必须是page的整数倍
bs->mapped = mmap(NULL, mapsize, PROT_READ, MAP_PRIVATE, bs->fd, 0);
if (bs->mapped == MAP_FAILED) {
goto fail_map; // binder设备内存无法映射
}
return bs;
fail_map:
close(bs->fd);
fail_open:
free(bs);
return NULL;
}
打开binder驱动相关操作:
先调用open()打开binder设备,open()方法经过系统调用,进入Binder驱动,然后调用方法binder_open(),该方法会在Binder驱动层创建一个binder_proc对象,再将binder_proc对象赋值给fd->private_data,同时放入全局链表binder_procs。再通过ioctl()检验当前binder版本与Binder驱动层的版本是否一致。
调用mmap()进行内存映射,同理mmap()方法经过系统调用,对应于Binder驱动层的binder_mmap()方法,该方法会在Binder驱动层创建Binder_buffer对象,并放入当前binder_proc的proc->buffers链表。
2.2.1 binder_state
[-> servicemanager/binder.c]
struct binder_state
{
int fd; // dev/binder的文件描述符
void *mapped; //指向mmap的内存地址
size_t mapsize; //分配的内存大小,默认为128KB
};
2.3 binder_become_context_manager
[-> servicemanager/binder.c]
int binder_become_context_manager(struct binder_state *bs)
{
//通过ioctl,传递BINDER_SET_CONTEXT_MGR指令【见小节2.3.1】
return ioctl(bs->fd, BINDER_SET_CONTEXT_MGR, 0);
}
成为上下文的管理者,整个系统中只有一个这样的管理者。 通过ioctl()方法经过系统调用,对应于Binder驱动层的binder_ioctl()方法.
2.3.1 binder_ioctl
[-> kernel/drivers/android/binder.c]
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
binder_lock(__func__);
switch (cmd) {
case BINDER_SET_CONTEXT_MGR:
ret = binder_ioctl_set_ctx_mgr(filp);//【见小节2.3.2】
break;
}
case :...
}
binder_unlock(__func__);
}
根据参数BINDER_SET_CONTEXT_MGR,最终调用binder_ioctl_set_ctx_mgr()方法,这个过程会持有binder_main_lock。
2.3.2 binder_ioctl_set_ctx_mgr
[-> kernel/drivers/android/binder.c]
static int binder_ioctl_set_ctx_mgr(struct file *filp)
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
kuid_t curr_euid = current_euid();
//保证只创建一次mgr_node对象
if (binder_context_mgr_node != NULL) {
ret = -EBUSY;
goto out;
}
if (uid_valid(binder_context_mgr_uid)) {
...
} else {
//设置当前线程euid作为Service Manager的uid
binder_context_mgr_uid = curr_euid;
}
//创建ServiceManager实体【见小节2.3.3】
binder_context_mgr_node = binder_new_node(proc, 0, 0);
...
binder_context_mgr_node->local_weak_refs++;
binder_context_mgr_node->local_strong_refs++;
binder_context_mgr_node->has_strong_ref = 1;
binder_context_mgr_node->has_weak_ref = 1;
out:
return ret;
}
进入binder驱动,在Binder驱动中定义的静态变量
// service manager所对应的binder_node;
static struct binder_node *binder_context_mgr_node;
// 运行service manager的线程uid
static kuid_t binder_context_mgr_uid = INVALID_UID;
创建了全局的binder_node对象binder_context_mgr_node,并将binder_context_mgr_node的强弱引用各加1.
2.3.3 binder_new_node
[-> kernel/drivers/android/binder.c]
static struct binder_node *binder_new_node(struct binder_proc *proc,
binder_uintptr_t ptr,
binder_uintptr_t cookie)
{
struct rb_node **p = &proc->nodes.rb_node;
struct rb_node *parent = NULL;
struct binder_node *node;
//首次进来为空
while (*p) {
parent = *p;
node = rb_entry(parent, struct binder_node, rb_node);
if (ptr < node->ptr)
p = &(*p)->rb_left;
else if (ptr > node->ptr)
p = &(*p)->rb_right;
else
return NULL;
}
//给新创建的binder_node 分配内核空间
node = kzalloc(sizeof(*node), GFP_KERNEL);
if (node == NULL)
return NULL;
binder_stats_created(BINDER_STAT_NODE);
// 将新创建的node对象添加到proc红黑树;
rb_link_node(&node->rb_node, parent, p);
rb_insert_color(&node->rb_node, &proc->nodes);
node->debug_id = ++binder_last_id;
node->proc = proc;
node->ptr = ptr;
node->cookie = cookie;
node->work.type = BINDER_WORK_NODE; //设置binder_work的type
INIT_LIST_HEAD(&node->work.entry);
INIT_LIST_HEAD(&node->async_todo);
return node;
}
在Binder驱动层创建binder_node结构体对象,并将当前binder_proc加入到binder_node的node->proc。并创建binder_node的async_todo和binder_work两个队列。
2.4 binder_loop
[-> servicemanager/binder.c]
void binder_loop(struct binder_state *bs, binder_handler func)
{
int res;
struct binder_write_read bwr;
uint32_t readbuf[32];
bwr.write_size = 0;
bwr.write_consumed = 0;
bwr.write_buffer = 0;
readbuf[0] = BC_ENTER_LOOPER;
//将BC_ENTER_LOOPER命令发送给binder驱动,让Service Manager进入循环 【见小节2.4.1】
binder_write(bs, readbuf, sizeof(uint32_t));
for (;;) {
bwr.read_size = sizeof(readbuf);
bwr.read_consumed = 0;
bwr.read_buffer = (uintptr_t) readbuf;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr); //进入循环,不断地binder读写过程
if (res < 0) {
break;
}
// 解析binder信息 【见小节2.5】
res = binder_parse(bs, 0, (uintptr_t) readbuf, bwr.read_consumed, func);
if (res == 0) {
break;
}
if (res < 0) {
break;
}
}
}
进入循环读写操作,由main()方法传递过来的参数func指向svcmgr_handler。
binder_write通过ioctl()将BC_ENTER_LOOPER命令发送给binder驱动,此时bwr只有write_buffer有数据,进入binder_thread_write()方法。
接下来进入for循环,执行ioctl(),此时bwr只有read_buffer有数据,那么进入binder_thread_read()方法。
2.4.1 binder_write
[-> servicemanager/binder.c]
int binder_write(struct binder_state *bs, void *data, size_t len)
{
struct binder_write_read bwr;
int res;
bwr.write_size = len;
bwr.write_consumed = 0;
bwr.write_buffer = (uintptr_t) data; //此处data为BC_ENTER_LOOPER
bwr.read_size = 0;
bwr.read_consumed = 0;
bwr.read_buffer = 0;
//【见小节2.4.2】
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
return res;
}
根据传递进来的参数,初始化bwr,其中write_size大小为4,write_buffer指向缓冲区的起始地址,其内容为BC_ENTER_LOOPER请求协议号。通过ioctl将bwr数据发送给binder驱动,则调用其binder_ioctl方法,如下:
2.4.2 binder_ioctl
[-> kernel/drivers/android/binder.c]
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
...
binder_lock(__func__);
thread = binder_get_thread(proc); //获取binder_thread
switch (cmd) {
case BINDER_WRITE_READ: //进行binder的读写操作
ret = binder_ioctl_write_read(filp, cmd, arg, thread); //【见小节2.4.3】
if (ret)
goto err;
break;
case ...
}
ret = 0;
err:
if (thread)
thread->looper &= ~BINDER_LOOPER_STATE_NEED_RETURN;
binder_unlock(__func__);
...
return ret;
}
2.4.3 binder_ioctl_write_read
[-> kernel/drivers/android/binder.c]
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) { //把用户空间数据ubuf拷贝到bwr
ret = -EFAULT;
goto out;
}
if (bwr.write_size > 0) { //此时写缓存有数据【见小节2.4.4】
ret = binder_thread_write(proc, thread,
bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
...
}
if (bwr.read_size > 0) { //此时读缓存无数据
...
}
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) { //将内核数据bwr拷贝到用户空间ubuf
ret = -EFAULT;
goto out;
}
out:
return ret;
}
此处将用户空间的binder_write_read结构体 拷贝到内核空间.
2.4.4 binder_thread_write
[-> kernel/drivers/android/binder.c]
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) {
get_user(cmd, (uint32_t __user *)ptr); //获取命令
switch (cmd) {
case BC_ENTER_LOOPER:
//设置该线程的looper状态
thread->looper |= BINDER_LOOPER_STATE_ENTERED;
break;
case ...;
}
} }
从bwr.write_buffer拿出cmd数据,此处为BC_ENTER_LOOPER. 可见上层本次调用binder_write()方法,主要是完成设置当前线程的looper状态为BINDER_LOOPER_STATE_ENTERED。
2.5 binder_parse
[-> servicemanager/binder.c]
int binder_parse(struct binder_state *bs, struct binder_io *bio,
uintptr_t ptr, size_t size, binder_handler func)
{
int r = 1;
uintptr_t end = ptr + (uintptr_t) size;
while (ptr < end) {
uint32_t cmd = *(uint32_t *) ptr;
ptr += sizeof(uint32_t);
switch(cmd) {
case BR_NOOP: //无操作,退出循环
break;
case BR_TRANSACTION_COMPLETE:
break;
case BR_INCREFS:
case BR_ACQUIRE:
case BR_RELEASE:
case BR_DECREFS:
ptr += sizeof(struct binder_ptr_cookie);
break;
case BR_TRANSACTION: {
struct binder_transaction_data *txn = (struct binder_transaction_data *) ptr;
...
binder_dump_txn(txn);
if (func) {
unsigned rdata[256/4];
struct binder_io msg;
struct binder_io reply;
int res;
//【见小节2.5.1】
bio_init(&reply, rdata, sizeof(rdata), 4);
bio_init_from_txn(&msg, txn); //从txn解析出binder_io信息
//【见小节2.6】
res = func(bs, txn, &msg, &reply);
//【见小节3.4】
binder_send_reply(bs, &reply, txn->data.ptr.buffer, res);
}
ptr += sizeof(*txn);
break;
}
case BR_REPLY: {
struct binder_transaction_data *txn = (struct binder_transaction_data *) ptr;
...
binder_dump_txn(txn);
if (bio) {
bio_init_from_txn(bio, txn);
bio = 0;
}
ptr += sizeof(*txn);
r = 0;
break;
}
case BR_DEAD_BINDER: {
struct binder_death *death = (struct binder_death *)(uintptr_t) *(binder_uintptr_t *)ptr;
ptr += sizeof(binder_uintptr_t);
// binder死亡消息【见小节3.3】
death->func(bs, death->ptr);
break;
}
case BR_FAILED_REPLY:
r = -1;
break;
case BR_DEAD_REPLY:
r = -1;
break;
default:
return -1;
}
}
return r;
}
解析binder信息,此处参数ptr指向BC_ENTER_LOOPER,func指向svcmgr_handler。故有请求到来,则调用svcmgr_handler。
2.5.1 bio_init
[-> servicemanager/binder.c]
void bio_init(struct binder_io *bio, void *data,
size_t maxdata, size_t maxoffs)
{
size_t n = maxoffs * sizeof(size_t);
if (n > maxdata) {
...
}
bio->data = bio->data0 = (char *) data + n;
bio->offs = bio->offs0 = data;
bio->data_avail = maxdata - n;
bio->offs_avail = maxoffs;
bio->flags = 0;
}
其中
struct binder_io
{
char *data; /* pointer to read/write from */
binder_size_t *offs; /* array of offsets */
size_t data_avail; /* bytes available in data buffer */
size_t offs_avail; /* entries available in offsets array */
char *data0; //data buffer起点位置
binder_size_t *offs0; //buffer偏移量的起点位置
uint32_t flags;
uint32_t unused;
};
2.5.2 bio_init_from_txn
[-> servicemanager/binder.c]
void bio_init_from_txn(struct binder_io *bio, struct binder_transaction_data *txn)
{
bio->data = bio->data0 = (char *)(intptr_t)txn->data.ptr.buffer;
bio->offs = bio->offs0 = (binder_size_t *)(intptr_t)txn->data.ptr.offsets;
bio->data_avail = txn->data_size;
bio->offs_avail = txn->offsets_size / sizeof(size_t);
bio->flags = BIO_F_SHARED;
}
将readbuf的数据赋给bio对象的data
2.6 svcmgr_handler
[-> service_manager.c]
int svcmgr_handler(struct binder_state *bs,
struct binder_transaction_data *txn,
struct binder_io *msg,
struct binder_io *reply)
{
struct svcinfo *si; //【见小节2.6.1】
uint16_t *s;
size_t len;
uint32_t handle;
uint32_t strict_policy;
int allow_isolated;
...
strict_policy = bio_get_uint32(msg);
s = bio_get_string16(msg, &len);
...
switch(txn->code) {
case SVC_MGR_GET_SERVICE:
case SVC_MGR_CHECK_SERVICE:
s = bio_get_string16(msg, &len); //服务名
//根据名称查找相应服务 【见小节3.1】
handle = do_find_service(bs, s, len, txn->sender_euid, txn->sender_pid);
//【见小节3.1.2】
bio_put_ref(reply, handle);
return 0;
case SVC_MGR_ADD_SERVICE:
s = bio_get_string16(msg, &len); //服务名
handle = bio_get_ref(msg); //handle【见小节3.2.3】
allow_isolated = bio_get_uint32(msg) ? 1 : 0;
//注册指定服务 【见小节3.2】
if (do_add_service(bs, s, len, handle, txn->sender_euid,
allow_isolated, txn->sender_pid))
return -1;
break;
case SVC_MGR_LIST_SERVICES: {
uint32_t n = bio_get_uint32(msg);
if (!svc_can_list(txn->sender_pid)) {
return -1;
}
si = svclist;
while ((n-- > 0) && si)
si = si->next;
if (si) {
bio_put_string16(reply, si->name);
return 0;
}
return -1;
}
default:
return -1;
}
bio_put_uint32(reply, 0);
return 0;
}
该方法的功能:查询服务,注册服务,以及列举所有服务
2.6.1 svcinfo
struct svcinfo
{
struct svcinfo *next;
uint32_t handle; //服务的handle值
struct binder_death death;
int allow_isolated;
size_t len; //名字长度
uint16_t name[0]; //服务名
};
每一个服务用svcinfo结构体来表示,该handle值是在注册服务的过程中,由服务所在进程那一端所确定的。
三. 核心工作
servicemanager的核心工作就是注册服务和查询服务。
3.1 do_find_service
[-> service_manager.c]
uint32_t do_find_service(struct binder_state *bs, const uint16_t *s, size_t len, uid_t uid, pid_t spid)
{
//查询相应的服务 【见小节3.1.1】
struct svcinfo *si = find_svc(s, len);
if (!si || !si->handle) {
return 0;
}
if (!si->allow_isolated) {
uid_t appid = uid % AID_USER;
//检查该服务是否允许孤立于进程而单独存在
if (appid >= AID_ISOLATED_START && appid <= AID_ISOLATED_END) {
return 0;
}
}
//服务是否满足查询条件
if (!svc_can_find(s, len, spid)) {
return 0;
}
return si->handle;
}
查询到目标服务,并返回该服务所对应的handle
3.1.1 find_svc
struct svcinfo *find_svc(const uint16_t *s16, size_t len)
{
struct svcinfo *si;
for (si = svclist; si; si = si->next) {
//当名字完全一致,则返回查询到的结果
if ((len == si->len) &&
!memcmp(s16, si->name, len * sizeof(uint16_t))) {
return si;
}
}
return NULL;
}
从svclist服务列表中,根据服务名遍历查找是否已经注册。当服务已存在svclist,则返回相应的服务名,否则返回NULL。
当找到服务的handle, 则调用bio_put_ref(reply, handle),将handle封装到reply.
3.1.2 bio_put_ref
void bio_put_ref(struct binder_io *bio, uint32_t handle)
{
struct flat_binder_object *obj;
if (handle)
obj = bio_alloc_obj(bio); //[见小节3.1.3]
else
obj = bio_alloc(bio, sizeof(*obj));
if (!obj)
return;
obj->flags = 0x7f | FLAT_BINDER_FLAG_ACCEPTS_FDS;
obj->type = BINDER_TYPE_HANDLE; //返回的是HANDLE类型
obj->handle = handle;
obj->cookie = 0;
}
3.1.3 bio_alloc_obj
static struct flat_binder_object *bio_alloc_obj(struct binder_io *bio)
{
struct flat_binder_object *obj;
obj = bio_alloc(bio, sizeof(*obj));//[见小节3.1.4]
if (obj && bio->offs_avail) {
bio->offs_avail--;
*bio->offs++ = ((char*) obj) - ((char*) bio->data0);
return obj;
}
bio->flags |= BIO_F_OVERFLOW;
return NULL;
}
3.1.4 bio_alloc
static void *bio_alloc(struct binder_io *bio, size_t size)
{
size = (size + 3) & (~3);
if (size > bio->data_avail) {
bio->flags |= BIO_F_OVERFLOW;
return NULL;
} else {
void *ptr = bio->data;
bio->data += size;
bio->data_avail -= size;
return ptr;
}
}
3.2 do_add_service
[-> service_manager.c]
int do_add_service(struct binder_state *bs,
const uint16_t *s, size_t len,
uint32_t handle, uid_t uid, int allow_isolated,
pid_t spid)
{
struct svcinfo *si;
if (!handle || (len == 0) || (len > 127))
return -1;
//权限检查【见小节3.2.1】
if (!svc_can_register(s, len, spid)) {
return -1;
}
//服务检索【见小节3.1.1】
si = find_svc(s, len);
if (si) {
if (si->handle) {
svcinfo_death(bs, si); //服务已注册时,释放相应的服务【见小节3.2.2】
}
si->handle = handle;
} else {
si = malloc(sizeof(*si) + (len + 1) * sizeof(uint16_t));
if (!si) { //内存不足,无法分配足够内存
return -1;
}
si->handle = handle;
si->len = len;
memcpy(si->name, s, (len + 1) * sizeof(uint16_t)); //内存拷贝服务信息
si->name[len] = '\0';
si->death.func = (void*) svcinfo_death;
si->death.ptr = si;
si->allow_isolated = allow_isolated;
si->next = svclist; // svclist保存所有已注册的服务
svclist = si;
}
//以BC_ACQUIRE命令,handle为目标的信息,通过ioctl发送给binder驱动
binder_acquire(bs, handle);
//以BC_REQUEST_DEATH_NOTIFICATION命令的信息,通过ioctl发送给binder驱动,主要用于清理内存等收尾工作。[见小节3.3]
binder_link_to_death(bs, handle, &si->death);
return 0;
}
注册服务的分以下3部分工作:
- svc_can_register:检查权限,检查selinux权限是否满足;
- find_svc:服务检索,根据服务名来查询匹配的服务;
- svcinfo_death:释放服务,当查询到已存在同名的服务,则先清理该服务信息,再将当前的服务加入到服务列表svclist;
3.2.1 svc_can_register
[-> service_manager.c]
static int svc_can_register(const uint16_t *name, size_t name_len, pid_t spid)
{
const char *perm = "add";
//检查selinux权限是否满足
return check_mac_perms_from_lookup(spid, perm, str8(name, name_len)) ? 1 : 0;
}
3.2.2 svcinfo_death
[-> service_manager.c]
void svcinfo_death(struct binder_state *bs, void *ptr)
{
struct svcinfo *si = (struct svcinfo* ) ptr;
if (si->handle) {
binder_release(bs, si->handle);
si->handle = 0;
}
}
3.2.3 bio_get_ref
[-> servicemanager/binder.c]
uint32_t bio_get_ref(struct binder_io *bio)
{
struct flat_binder_object *obj;
obj = _bio_get_obj(bio);
if (!obj)
return 0;
if (obj->type == BINDER_TYPE_HANDLE)
return obj->handle;
return 0;
}
3.3 binder_link_to_death
[-> servicemanager/binder.c]
void binder_link_to_death(struct binder_state *bs, uint32_t target, struct binder_death *death)
{
struct {
uint32_t cmd;
struct binder_handle_cookie payload;
} __attribute__((packed)) data;
data.cmd = BC_REQUEST_DEATH_NOTIFICATION;
data.payload.handle = target;
data.payload.cookie = (uintptr_t) death;
binder_write(bs, &data, sizeof(data)); //[见小节3.3.1]
}
binder_write经过跟小节2.4.1一样的方式, 进入Binder driver后,直接调用后进入binder_thread_write, 处理BC_REQUEST_DEATH_NOTIFICATION命令
3.3.1 binder_ioctl_write_read
[-> kernel/drivers/android/binder.c]
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) { //把用户空间数据ubuf拷贝到bwr
ret = -EFAULT;
goto out;
}
if (bwr.write_size > 0) { //此时写缓存有数据【见小节3.3.2】
ret = binder_thread_write(proc, thread,
bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
if (bwr.read_size > 0) { //此时读缓存有数据【见小节3.3.3】
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size,
&bwr.read_consumed,
filp->f_flags & O_NONBLOCK);
if (!list_empty(&proc->todo)) //进程todo队列不为空,则唤醒该队列中的线程
wake_up_interruptible(&proc->wait);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) { //将内核数据bwr拷贝到用户空间ubuf
ret = -EFAULT;
goto out;
}
out:
return ret;
}
3.3.2 binder_thread_write
[-> kernel/drivers/android/binder.c]
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
struct binder_context *context = proc->context;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed; //ptr指向小节3.2.3中bwr中write_buffer的data.
void __user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) {
get_user(cmd, (uint32_t __user *)ptr); //获取BC_REQUEST_DEATH_NOTIFICATION
ptr += sizeof(uint32_t);
switch (cmd) {
case BC_REQUEST_DEATH_NOTIFICATION:{ //注册死亡通知
uint32_t target;
void __user *cookie;
struct binder_ref *ref;
struct binder_ref_death *death;
get_user(target, (uint32_t __user *)ptr); //获取target
ptr += sizeof(uint32_t);
get_user(cookie, (void __user * __user *)ptr); //获取death
ptr += sizeof(void *);
ref = binder_get_ref(proc, target); //拿到目标服务的binder_ref
if (cmd == BC_REQUEST_DEATH_NOTIFICATION) {
if (ref->death) {
break; //已设置死亡通知
}
death = kzalloc(sizeof(*death), GFP_KERNEL);
INIT_LIST_HEAD(&death->work.entry);
death->cookie = cookie;
ref->death = death;
if (ref->node->proc == NULL) { //当目标binder服务所在进程已死,则发送死亡通知
ref->death->work.type = BINDER_WORK_DEAD_BINDER;
//当前线程为binder线程,则直接添加到当前线程的todo队列. 接下来,进入[小节3.2.6]
if (thread->looper & (BINDER_LOOPER_STATE_REGISTERED | BINDER_LOOPER_STATE_ENTERED)) {
list_add_tail(&ref->death->work.entry, &thread->todo);
} else {
list_add_tail(&ref->death->work.entry, &proc->todo);
wake_up_interruptible(&proc->wait);
}
}
} else {
...
}
} break;
case ...;
}
*consumed = ptr - buffer;
}
}
此方法中的proc, thread都是指当前servicemanager进程的信息. 此时TODO队列有数据,则进入binder_thread_read.
那么哪些场景会向队列增加BINDER_WORK_DEAD_BINDER事务呢? 那就是当binder所在进程死亡后,会调用binder_release方法, 然后调用binder_node_release.这个过程便会发出死亡通知的回调.
3.3.3 binder_thread_read
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
...
//只有当前线程todo队列为空,并且transaction_stack也为空,才会开始处于当前进程的事务
if (wait_for_proc_work) {
...
ret = wait_event_freezable_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else {
...
ret = wait_event_freezable(thread->wait, binder_has_thread_work(thread));
}
binder_lock(__func__); //加锁
if (wait_for_proc_work)
proc->ready_threads--; //空闲的binder线程减1
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
//从todo队列拿出前面放入的binder_work, 此时type为BINDER_WORK_DEAD_BINDER
if (!list_empty(&thread->todo)) {
w = list_first_entry(&thread->todo, struct binder_work,
entry);
} else if (!list_empty(&proc->todo) && wait_for_proc_work) {
w = list_first_entry(&proc->todo, struct binder_work,
entry);
}
switch (w->type) {
case BINDER_WORK_DEAD_BINDER: {
struct binder_ref_death *death;
uint32_t cmd;
death = container_of(w, struct binder_ref_death, work);
if (w->type == BINDER_WORK_CLEAR_DEATH_NOTIFICATION)
...
else
cmd = BR_DEAD_BINDER; //进入此分支
put_user(cmd, (uint32_t __user *)ptr);//拷贝到用户空间[见小节3.3.4]
ptr += sizeof(uint32_t);
//此处的cookie是前面传递的svcinfo_death
put_user(death->cookie, (binder_uintptr_t __user *)ptr);
ptr += sizeof(binder_uintptr_t);
if (w->type == BINDER_WORK_CLEAR_DEATH_NOTIFICATION) {
...
} else
list_move(&w->entry, &proc->delivered_death);
if (cmd == BR_DEAD_BINDER)
goto done;
} break;
}
}
...
return 0;
}
将命令BR_DEAD_BINDER写到用户空间, 此处的cookie是前面传递的svcinfo_death. 当binder_loop下一次 执行binder_parse的过程便会处理该消息。
3.3.4 binder_parse
[-> servicemanager/binder.c]
int binder_parse(struct binder_state *bs, struct binder_io *bio,
uintptr_t ptr, size_t size, binder_handler func)
{
int r = 1;
uintptr_t end = ptr + (uintptr_t) size;
while (ptr < end) {
uint32_t cmd = *(uint32_t *) ptr;
ptr += sizeof(uint32_t);
switch(cmd) {
case BR_DEAD_BINDER: {
struct binder_death *death = (struct binder_death *)(uintptr_t) *(binder_uintptr_t *)ptr;
ptr += sizeof(binder_uintptr_t);
// binder死亡消息【见小节3.3.5】
death->func(bs, death->ptr);
break;
}
...
}
}
return r;
}
由小节3.2的 si->death.func = (void*) svcinfo_death; 可知此处 death->func便是执行svcinfo_death()方法.
3.3.5 svcinfo_death
[-> service_manager.c]
void svcinfo_death(struct binder_state *bs, void *ptr)
{
struct svcinfo *si = (struct svcinfo* ) ptr;
if (si->handle) {
binder_release(bs, si->handle);
si->handle = 0;
}
}
3.3.6 binder_release
[-> service_manager.c]
void binder_release(struct binder_state *bs, uint32_t target)
{
uint32_t cmd[2];
cmd[0] = BC_RELEASE;
cmd[1] = target;
binder_write(bs, cmd, sizeof(cmd));
}
向Binder Driver写入BC_RELEASE命令, 最终进入Binder Driver后执行binder_dec_ref(ref, 1)来减少binder node的引用.
3.4 binder_send_reply
[-> servicemanager/binder.c]
void binder_send_reply(struct binder_state *bs,
struct binder_io *reply,
binder_uintptr_t buffer_to_free,
int status)
{
struct {
uint32_t cmd_free;
binder_uintptr_t buffer;
uint32_t cmd_reply;
struct binder_transaction_data txn;
} __attribute__((packed)) data;
data.cmd_free = BC_FREE_BUFFER; //free buffer命令
data.buffer = buffer_to_free;
data.cmd_reply = BC_REPLY; // reply命令
data.txn.target.ptr = 0;
data.txn.cookie = 0;
data.txn.code = 0;
if (status) {
data.txn.flags = TF_STATUS_CODE;
data.txn.data_size = sizeof(int);
data.txn.offsets_size = 0;
data.txn.data.ptr.buffer = (uintptr_t)&status;
data.txn.data.ptr.offsets = 0;
} else {
data.txn.flags = 0;
data.txn.data_size = reply->data - reply->data0;
data.txn.offsets_size = ((char*) reply->offs) - ((char*) reply->offs0);
data.txn.data.ptr.buffer = (uintptr_t)reply->data0;
data.txn.data.ptr.offsets = (uintptr_t)reply->offs0;
}
//向Binder驱动通信
binder_write(bs, &data, sizeof(data));
}
当小节2.5执行binder_parse方法,先调用svcmgr_handler(),再然后执行binder_send_reply过程。该方法会调用 [小节2.4.1] binder_write进入binder驱动后,将BC_FREE_BUFFER和BC_REPLY命令协议发送给Binder驱动,向client端发送reply. 其中data的数据区中保存的是TYPE为HANDLE.
四. 总结
ServiceManger集中管理系统内的所有服务,通过权限控制进程是否有权注册服务,通过字符串名称来查找对应的Service; 由于ServiceManger进程建立跟所有向其注册服务的死亡通知, 那么当服务所在进程死亡后, 会只需告知ServiceManager. 每个Client通过查询ServiceManager可获取Server进程的情况,降低所有Client进程直接检测会导致负载过重。
ServiceManager启动流程:
- 打开binder驱动,并调用mmap()方法分配128k的内存映射空间:binder_open();
- 通知binder驱动使其成为守护进程:binder_become_context_manager();
- 验证selinux权限,判断进程是否有权注册或查看指定服务;
- 进入循环状态,等待Client端的请求:binder_loop()。
- 注册服务的过程,根据服务名称,但同一个服务已注册,重新注册前会先移除之前的注册信息;
- 死亡通知: 当binder所在进程死亡后,会调用binder_release方法,然后调用binder_node_release.这个过程便会发出死亡通知的回调.
ServiceManager最核心的两个功能为查询和注册服务:
- 注册服务:记录服务名和handle信息,保存到svclist列表;
- 查询服务:根据服务名查询相应的的handle信息。
微信公众号 Gityuan | 微博 weibo.com/gityuan | 博客 留言区交流